
Mesh Represented Recycle Learning for 3D Hand Pose and Mesh Estimation
3D 손 포즈 및 메쉬 복원을 위한 메쉬 표상 재활용 학습법
스마트 TV, VR/AR 기기 등 인간-컴퓨터 상호작용(HCI)의 활용이 극대화되면서 사용자의 3차원 손 포즈 및 핸드 메쉬(3D Hand Mesh)를 정확하게 복원하는 기술이 중요해졌습니다. 하지만 실제 카메라 영상에서 손가락 관절의 3D 좌표 및 조밀한 3D 메쉬 버텍스(Vertices) 정답을 라벨링하는 것은 장비의 한계상 불가능에 가깝습니다.
이 때문에 그래픽스 툴로 정밀 생성된 합성 데이터(Synthetic data)로 학습한 뒤 실세계 데이터에 적용하지만, 배경, 피부 질감, 조명 차이로 발생하는 도메인 갭(Domain Gap)으로 인해 실제 TV 카메라 환경에서는 손가락이 구부러지는 궤적을 쫓지 못하는 현상이 생깁니다.
본 포스트에서는 2023년 arXiv에 투고된 Mesh Represented Recycle Learning (RecycleNet) 연구의 재배치 파이프라인과 3D 손 복원 아키텍처를 소개합니다.
1. 도메인 갭(Domain Gap) 극복을 위한 기존 방식의 한계
합성 데이터로 학습된 3D Hand Estimator 모델을 실제 손 이미지에 테스트하면 손가락이 꼬이거나 깊이(Depth)가 뭉개집니다.
- 일반적인 도메인 적응(Domain Adaptation) 기법들은 피처 수준의 정렬에 초점을 맞추어 정밀한 손가락 끝점(Fingertip)의 회귀 성능이 저하되는 한계가 있었습니다.
2. RecycleNet 핵심 아키텍처: Recycle Learning Loop
RecycleNet은 이미지 피처에 직접 손을 대는 대신, 추정된 3D 메쉬 결과물 자체를 재활용하여 정제(Refinement)하는 순환 구조(Recycle Learning Loop)를 취합니다.
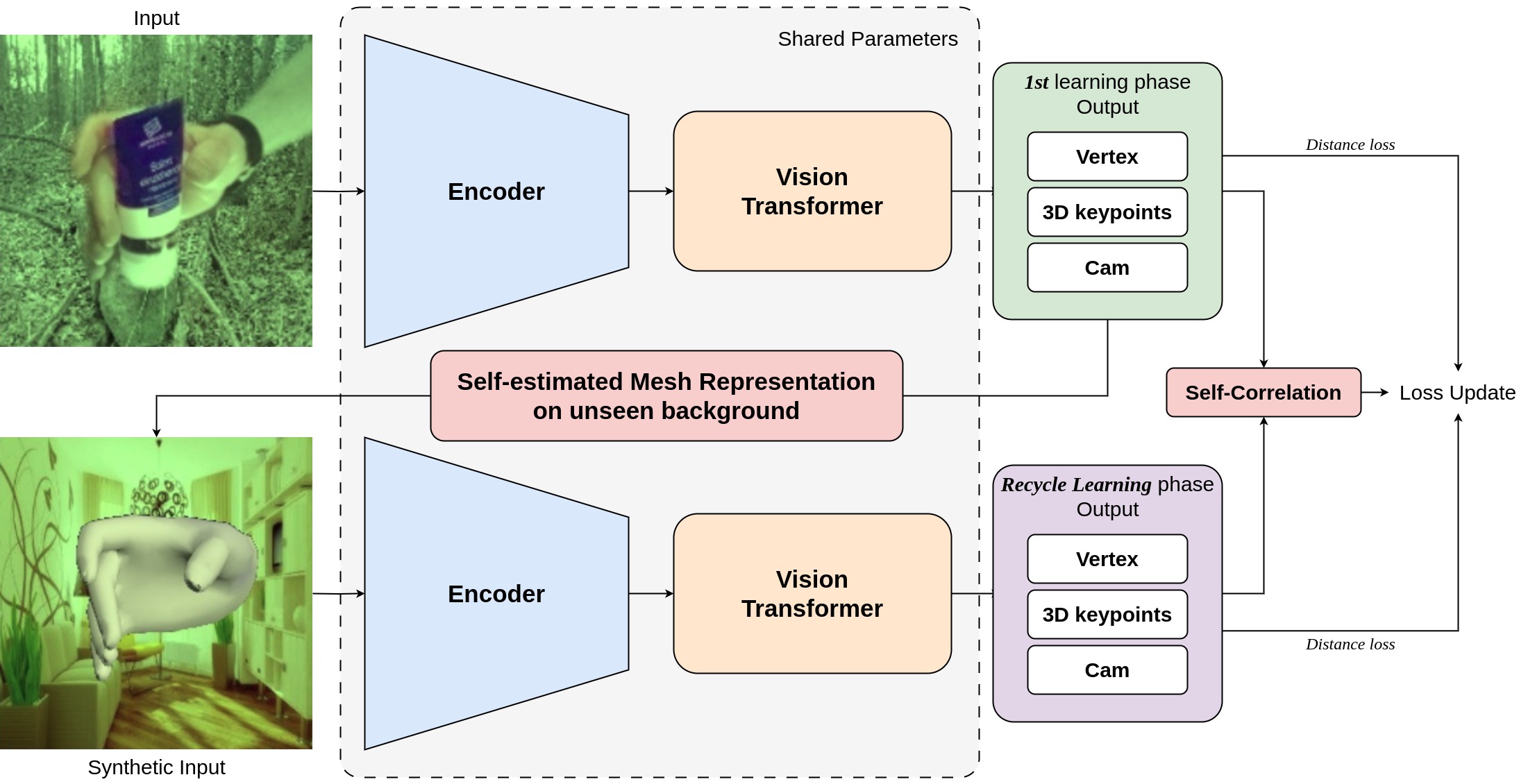
① Synthetic-to-Real Recycle Pipeline
- Step 1: 합성 데이터로 학습된 초기 예측 모델이 실제 무라벨 손 이미지(Unlabeled Real Image)로부터 3D Hand Mesh 파라미터(MANO 모델 파라미터)를 1차 예측합니다.
- Step 2: 1차 예측된 3D 메쉬 표상(Mesh Representation)을 다시 렌더링(Rendering)하여, 실세계 이미지의 실루엣 및 2D 관절 추정값과 매칭하는 자기지도 손실함수(Projection Loss & Silhouette Loss)를 설계합니다.
- Step 3 (Recycle): 실제 도메인의 렌더링된 메쉬를 다시 모델의 입력 데이터셋 풀에 피드백하여, 합성 도메인 가중치와 실제 도메인 피드백 루프가 균형을 이루도록 순환적으로 가중치를 업데이트(Recycle training)합니다.
② Finger-grouping Attention Mechanism
- 다섯 손가락 관절 간의 간섭(Interference)을 줄이고 독립적인 미세 동작을 포착하기 위해, 손가락 군별(Thumb, Index, Middle, Ring, Pinky)로 어텐션 가중치 영역을 나누어 연산하는 그룹핑 어텐션(Grouping Attention)을 적용하여 SOTA 성능(PA-MPJPE 향상)을 확보했습니다.
3. 결론 및 실무 의의
RecycleNet은 3D 메쉬의 기하학적 형상(Geometry) 정보를 학습 알고리즘 내부에서 재순환(Recycle)시킴으로써, 대규모 3D 실세계 정답 데이터 없이도 실세계 이미지 상의 손가락 끝점 복원 정확도를 비약적으로 향상시켰습니다. 본 연구 성과는 LG 스마트 TV의 손동작 제어 인식 솔루션 및 가상 스마트 어시스턴트 컨트롤러의 포즈 엔진 고도화에 직접적으로 기여했습니다.
Mesh Represented Recycle Learning for 3D Hand Pose and Mesh Estimation
Reconstructing 3D Hand Poses and Meshes is critical for next-generation Human-Computer Interaction (HCI) in VR, AR, and smart TVs. However, annotating 3D joint coordinates and dense mesh vertices in real-world images is practically impossible.
Although models trained on synthetic data offer a starting point, they fail under the domain gap (differences in background, lighting, and texture), causing hand movements to jitter in real TV cameras.
This post highlights Mesh Represented Recycle Learning (RecycleNet), published on arXiv in 2023.
1. Domain Adaptations Limitations
Applying synthetic-trained estimators to real-world hand images often results in distorted fingers or depth compression.
- Standard domain adaptation methods align high-level features but fail to preserve local joint structures, leading to inaccurate fingertip tracking.
2. Core Concepts: Recycle Learning Loop
Instead of aligning intermediate feature maps, RecycleNet recycles the predicted 3D mesh outputs to self-supervise the network.
① Synthetic-to-Real Recycle Pipeline
- Step 1: The initial network trained on synthetic data estimates 3D hand mesh parameters (using the MANO model) from unlabeled real images.
- Step 2: The estimated 3D mesh is re-projected back onto the 2D plane to compute self-supervised silhouette and 2D joint alignment losses.
- Step 3 (Recycle): The real-domain rendered mesh outputs are recycled back into the training pool, enabling a cyclic optimization process that balances synthetic features with real-world geometries.
② Finger-grouping Attention Mechanism
- To minimize keypoint cross-interference, we group attention maps by finger (Thumb, Index, Middle, Ring, Pinky), enabling high-fidelity fingertip tracking.
3. Industrial Impact
By recycling 3D mesh representations, RecycleNet improves 3D hand tracking on real-world inputs without dense hand annotations. This methodology served as a core engine for LG Smart TV hand-gesture control systems and smart assistant controllers.